FIGURE 1. The flowchart shows the major steps required to build the ADL australopithecine model. In the blue boxes, the ADL human model is driven with the Schreiber and Moissenet (2019) human locomotion data. From these ADL human simulations, the dimension of the pelvis and femur can be extracted as well as model motion profiles used at later stages of the process (Figure 5). The gray boxes show the major steps in transforming (TPS-based morphing) the ADL human pelvis to match the australopithecine morphology (A.L. 288-1 reduced-asymmetry pelvis; Australopithecus afarensis), thus creating the ADL australopithecine pelvis. The green boxes show the steps necessary to create the ADL australopithecine (hybrid) femur from the ADL human femur.
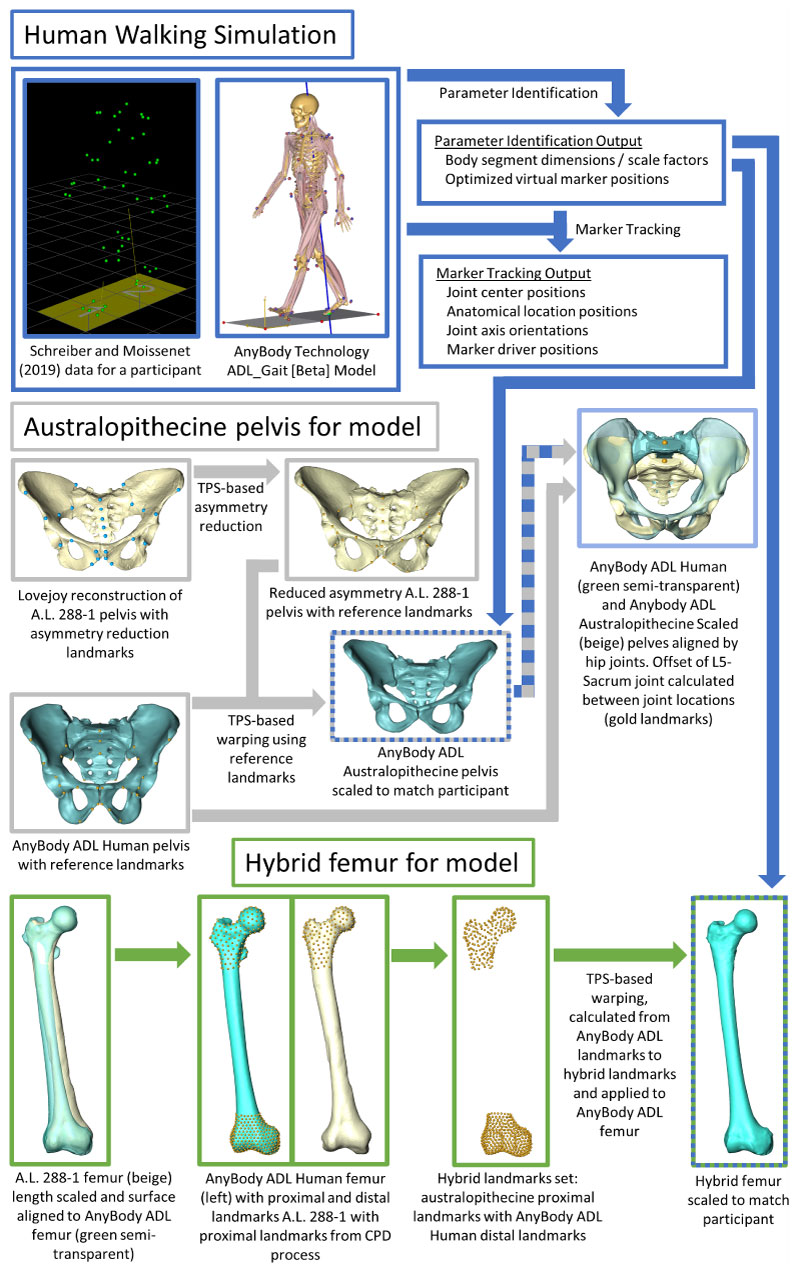
FIGURE 2. The top images show an overlay of the reduced-asymmetry australopithecine pelvis (beige) with the ADL australopithecine pelvis (dark green). The bottom color-coded distance map pelvis show the distance between the reduced-asymmetry australopithecine pelvis with the ADL australopithecine pelvis.
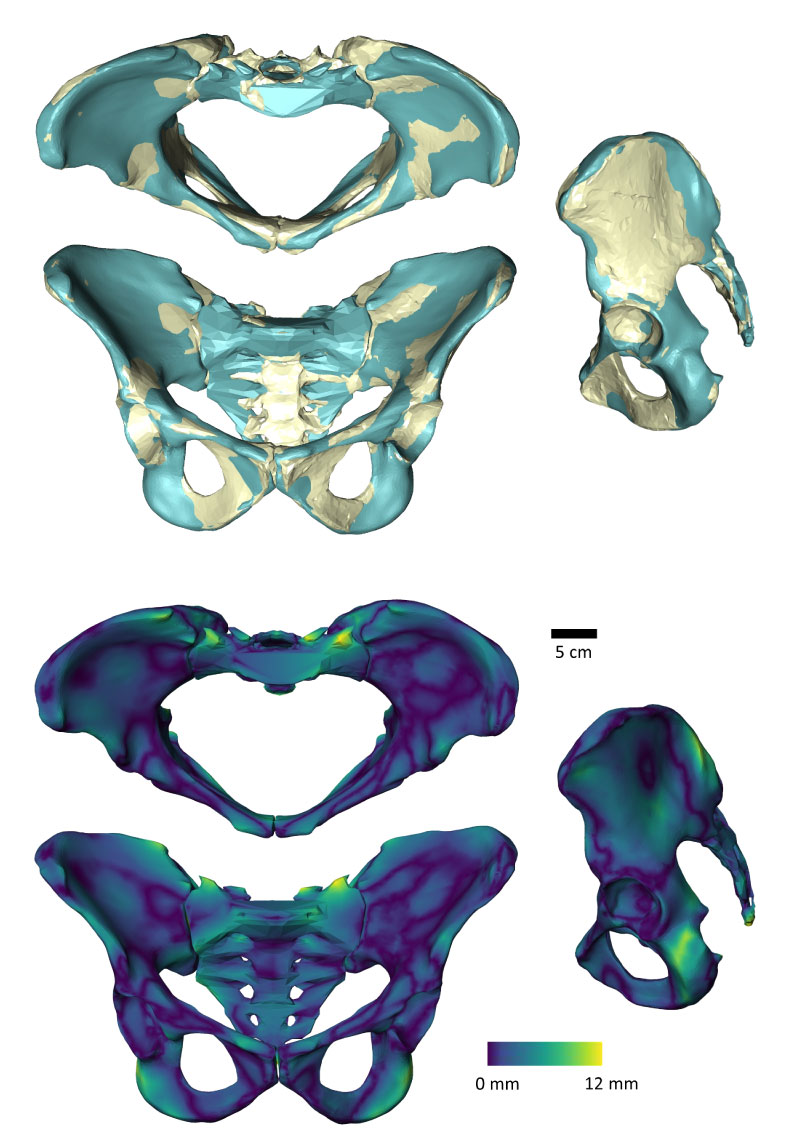
FIGURE 3. Control landmarks for the AnyBody TPS-morphing on the ADL human femur and pelvis.
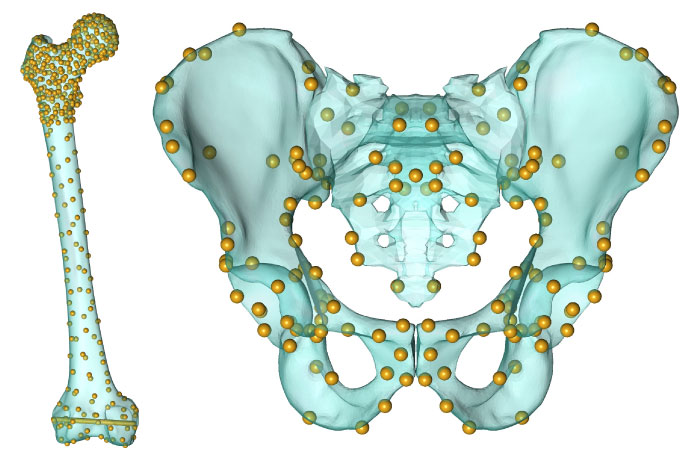
FIGURE 4. AnyBody australopithecine musculoskeletal model without (left) and with (right) muscle model visualization.
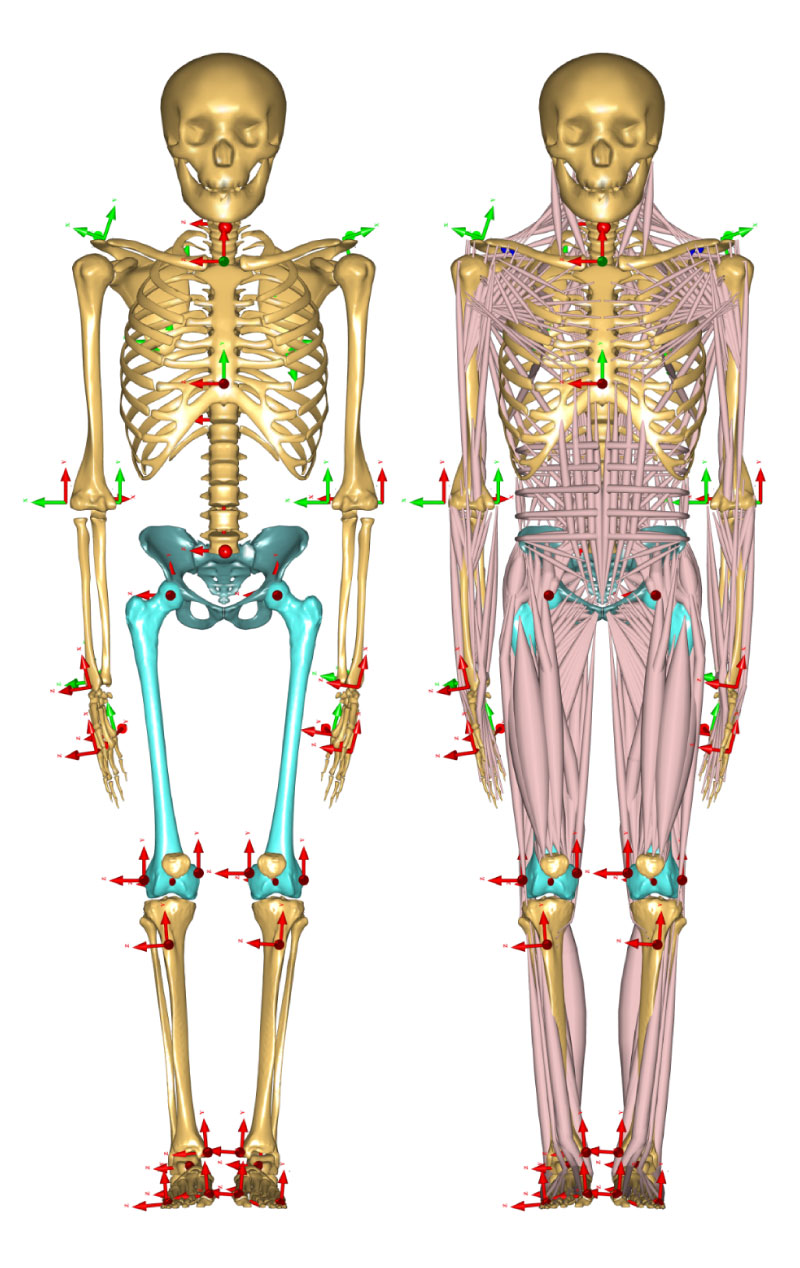
FIGURE 5. This flowchart shows the major steps required to generate the C3D motion file to drive the walking simulations with an australopithecine hip. Blue, light blue, and blue/grey and blue/green dashed boxes are the same boxes from Figure 1. The original ADL human model (blue box) is morphed based on the australopithecine pelvis (blue/grey dashed box) and femur (blue/green dashed box) to create the ADL australopithecine model (orange box). The results from the human walking simulation (blue box) are combined with the L5-sacral offset translation (light blue box) to generate new “experimental marker data” that are combined with the original ground reaction force data from Schreiber and Moissenet (2019) (purple box). The ADL australopithecine model and new motion data are then used to drive the simulations of walking with an australopithecine hip.
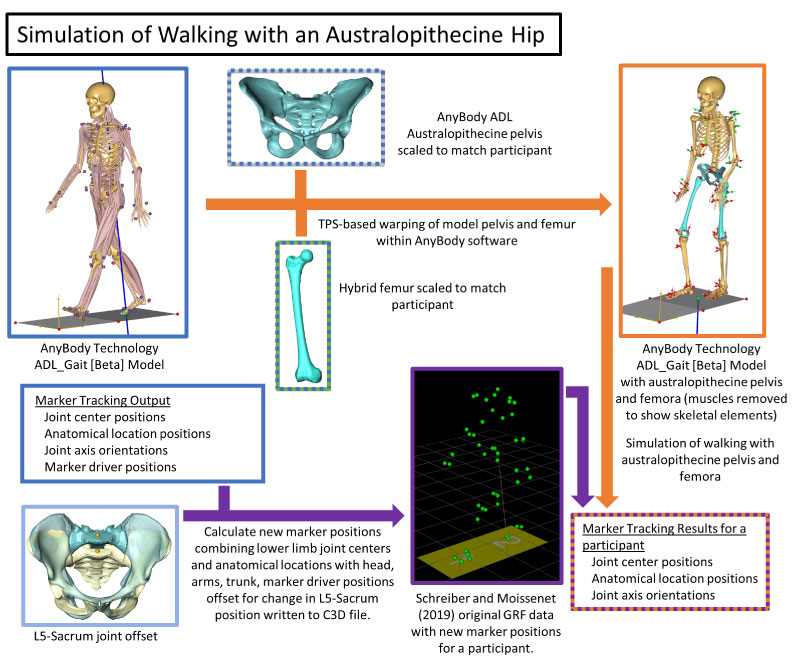
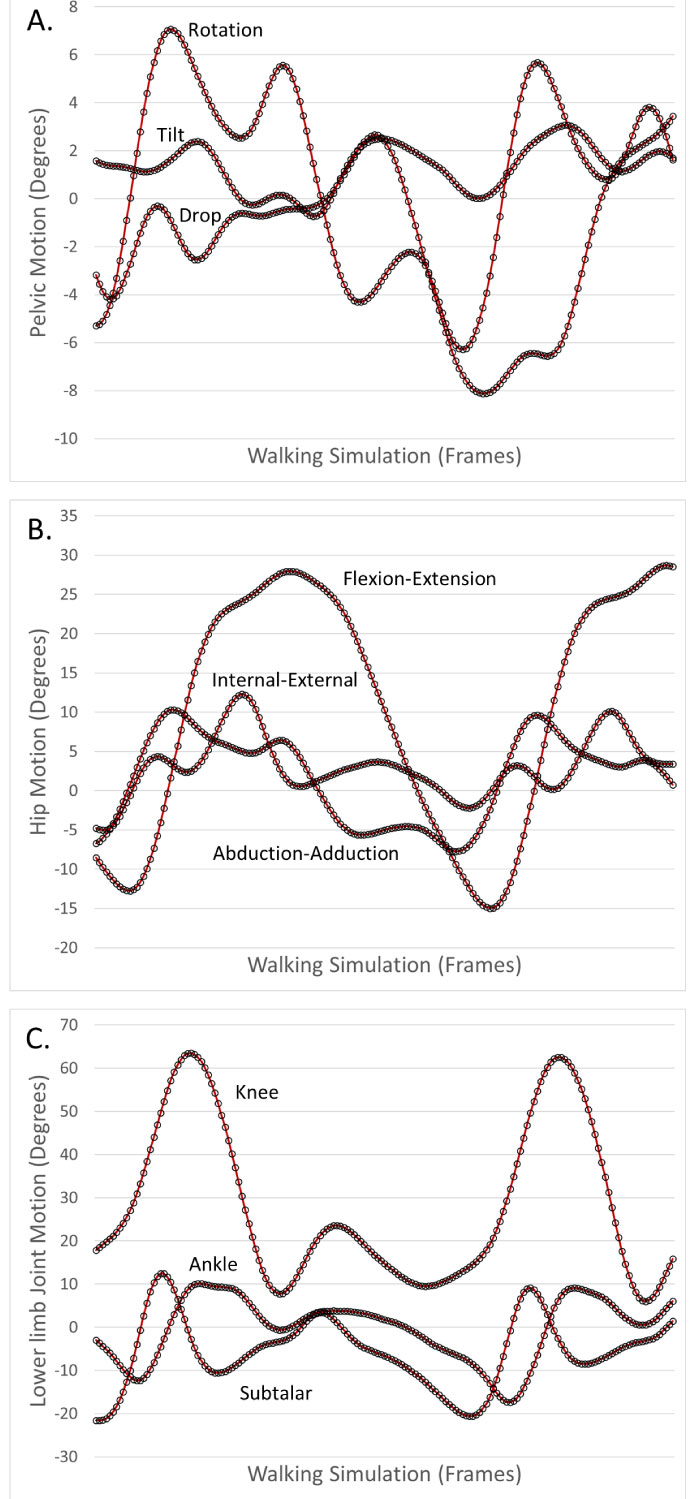
FIGURE 6. Motion of the pelvis and lower limb joints for one individual walking simulation with both human (red lines) and australopithecine (black circles) shaped hips. A. Pelvic rotation (transverse plane), tilt (sagittal plane) and drop (coronal plane). B. Hip flexion-extension, abduction-adduction, and internal-external rotation. C. Knee flexion-extension, ankle dorsi-plantar flexion, subtalar eversion-inversion.