INTRODUCTION
Morphometry is an important method in taxonomic paleontology. In combination with paleoenvironmental, geochemical, and molecular analysis of species, traditional morphometry aids investigation about evolution of species through time and space, and so allows the observation and understanding of the history of biodiversity on earth. Despite microfossils being particularly interesting subjects for the study of evolution, morphometry remains underrepresented in micropaleontological research because it is time-consuming to collect quantitative data when the tiny shells must be properly oriented prior to measurements in order to guarantee comparable results.
During recent years, several products for automated routine investigations under light microscopes have come to the market, including motorized planar gliding stages for transmission light microscopes (Ludl, Märzhäuser, and other brands). Such systems are widely used in optical screening of medical preparations or in micropaleontology for embedded microfossils like diatoms, calcareous nannofossils or palynomorphs (Bollmann et al. 2004). Other automated systems are capable of imaging and measuring randomly oriented isolated microfossils under a moving camera (Schmidt 2002;
Bollmann et al. 2004). These devices move the objects into the light path of the camera system, but suffer from lacking 3D-orientation of microfossils into a standard measurement position. There exist novel non-destructive imaging systems like micro X-ray CT (see e-foram Stock at
Tohoku University Museum) to model microfossil surfaces and internal structures but, apart from high prices, these devices are not suitable for automated multiple object screening.
 Traditional morphometry requires that microfossils be moved into a standard position under a binocular. An extended morphometric investigation with thousands of specimens takes too long for a typical research project. In order to facilitate our own research on morphological variability and evolution within the Neogene planktonic foraminifer Globorotalia menardii, an orientation robot for isolated shells in reflected light called AMOR (Automated Measurement system for shell mORphology) was built (Figure 1). Preliminary results about the morphological variability of menardiform globorotalids, which still are based on manual data collection using a digital imaging system, are given in
Knappertsbusch (2007) and in
Brown (2007). Traditional morphometry requires that microfossils be moved into a standard position under a binocular. An extended morphometric investigation with thousands of specimens takes too long for a typical research project. In order to facilitate our own research on morphological variability and evolution within the Neogene planktonic foraminifer Globorotalia menardii, an orientation robot for isolated shells in reflected light called AMOR (Automated Measurement system for shell mORphology) was built (Figure 1). Preliminary results about the morphological variability of menardiform globorotalids, which still are based on manual data collection using a digital imaging system, are given in
Knappertsbusch (2007) and in
Brown (2007).
Steps toward instrument-assisted microfossil orientation for imaging started using a hemispherical stage: a simple manually driven two-axis tilting stage (Stage I, see
Knappertsbusch 2002), a motorized version of it (i.e., Stage III:
Knappertsbusch et al. 2006), and subsequent improvements on the motorization, including the construction of Stage IV, an automated multi-axis stage built by students at FHNW in 2005, succeeded by Stage V built by one of the authors (Binggeli) in 2006. Upon software integration with the motorized microscope, Stage V became part of AMOR (diploma thesis of
Herzig and Schmutz 2007) and AMOR2 (diploma thesis of
Stapfer 2007). AMOR2 was further improved mechanically (work of C. Schneider) and extended to become the current version AMOR3 (bachelor thesis of
Widmer, 2008). Although application of AMOR requires special slide preparation and pre-orientation of the microfossils, routine imaging is faster with higher precision than using the original hemispherical stage.
AMOR3 automatically moves a pre-oriented microfossil sitting in a faunal slide under the microscope lens, tilts it in x and y directions into a predefined orientation, focuses and rotates the image where necessary, automatically zooms to the optimal magnification, and then takes a digital image to store it to disc. This robot allows for rapid handling of standard micropaleontological slides having 36 or 60 fields but custom slides can be handled as well. It produces a series of images that can later be batch processed using a suite of morphometric programs described in
Knappertsbusch (1998,
2004).
 History of Stage Development History of Stage Development
The first tool for the orientation of isolated microfossils under a binocular was a hemispherical stage (Figure 2).
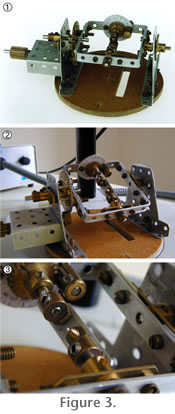 While observing the microfossil through the binocular microscope or on a computer monitor, the investigator needed to manually move the specimen as precisely as possible until a desired orientation was attained. This monotonous manipulation of microfossils gave way to the design of a mechanical stage (=Stage I), that can be placed under the binocular microscope for imaging a single specimen. This device was first realized with a
STOCKYS© toys set for children (see
Figure 3.1- 3.3). While observing the microfossil through the binocular microscope or on a computer monitor, the investigator needed to manually move the specimen as precisely as possible until a desired orientation was attained. This monotonous manipulation of microfossils gave way to the design of a mechanical stage (=Stage I), that can be placed under the binocular microscope for imaging a single specimen. This device was first realized with a
STOCKYS© toys set for children (see
Figure 3.1- 3.3).
The advantage of Stage I is that tilting in x and y directions can be controlled using goniometers, a prerequisite for the construction of stereographic virtual reality representations of microfossils under incident light (Knappertsbusch 2002). In Stage I the two perpendicular tilting-axes (x and y) are adjusted in such a way that the microfossil remains within the focal range of the microscope. This is achieved by two perpendicular frames, which are suspended in a cardanic geometry. In order not to touch the microscope objective, the inner frame (x-tilt) is moved by gears and co-axially (parallel) driven with the outer (y) tilting frame. This design is very compact and gives maximum freedom for tilting under the limited space underneath the microscope objective.
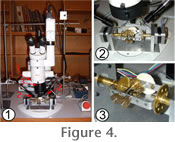 The next major advance was the motorization of the two tilting axes (Figure 4.1-4.2).
The motorization was accomplished using two stepping motors, which can be controlled via a computer (Knappertsbusch et al. 2006). Because each step of the motor is converted into small steps of angular increment, positioning of specimens is more precise than in Stage I. The next major advance was the motorization of the two tilting axes (Figure 4.1-4.2).
The motorization was accomplished using two stepping motors, which can be controlled via a computer (Knappertsbusch et al. 2006). Because each step of the motor is converted into small steps of angular increment, positioning of specimens is more precise than in Stage I.
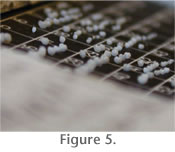 Stages I through III are designed for the orientation and imaging of a single specimen under a binocular microscope. For statistical morphometric studies, however, an apparatus for multiple specimens in micropaleontological faunal slides (Figure 5) was needed. Stages I through III are designed for the orientation and imaging of a single specimen under a binocular microscope. For statistical morphometric studies, however, an apparatus for multiple specimens in micropaleontological faunal slides (Figure 5) was needed.
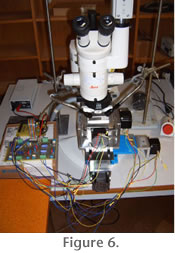 This goal was achieved with AMOR Stage IV (Figure 6) in collaboration with students of the University of Applied Sciences of Northwestern Switzerland (FHNW). This goal was achieved with AMOR Stage IV (Figure 6) in collaboration with students of the University of Applied Sciences of Northwestern Switzerland (FHNW).
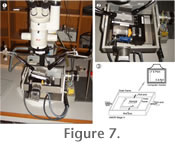 AMOR Stage IV was thus the first motorized and automated gliding and tilting stage for standard micropaleontological gridded faunal slides under a binocular microscope; however, due to disturbing oscillations while imaging Stage IV required improvement. Stage IV was redesigned by and programmed to AMOR Stage V (Herzig and Schmutz 2007, see
Figure 7.1), then extended to AMOR2 (Stapfer 2007), and recently improved to AMOR3 (Widmer 2008). AMOR Stage IV was thus the first motorized and automated gliding and tilting stage for standard micropaleontological gridded faunal slides under a binocular microscope; however, due to disturbing oscillations while imaging Stage IV required improvement. Stage IV was redesigned by and programmed to AMOR Stage V (Herzig and Schmutz 2007, see
Figure 7.1), then extended to AMOR2 (Stapfer 2007), and recently improved to AMOR3 (Widmer 2008).
|