| |
INTRODUCTION
Three dimensional (3D) surface scans of complicated morphological structures (e.g., bones, teeth and shells) are increasingly easy to generate. Laser scanning, pin scanning, computerized tomography, X-ray microtomography, and magnetic resonance imaging all produce 3D data representing the surfaces of modern and fossil specimens (e.g.,
Jernvall and Selänne 1999;
Ungar and Williamson 2000;
Lyons et al. 2000;
Sutton et al. 2001;
Wilhite 2003;
Polcyn et al. 2002,
2005;
Alonso et al. 2004;
Colbert 2005;
Polly et al. 2006;
Schwarz et al. 2005;
Evans et al. 2007;
Evans and Fortelius 2007). From such data it is possible to calculate volumes, surface areas, and morphological indices that can be used to describe functional or taxonomic properties.
The ready availability of 3D scan data make desirable the quantitative comparison and analysis of 3D surface shapes themselves. Here we present an approach for the direct morphometric analysis of 3D surfaces. Our method, which we have called 'eigensurface analysis' (see also
MacLeod 2008;
Polly 2008), is related to geometric morphometric techniques such as the analysis of landmarks (Bookstein 1991;
Rohlf 1993;
Dryden and Mardia 1998;
Zelditch et al. 2004) and eigenshape analysis of outlines (Lohmann 1983;
MacLeod and Rose 1993;
MacLeod 1999). Our method reduces the original 3D scan of surface points to a grid of quasi-evenly spaced points. We discuss several approaches to choosing the point grid, but here we use a small number of landmark points on the specimen to superimpose the point cloud-represented surfaces before interpolating the grid of eigensurface points. Principal components of the covariance matrix of the grid points are then used to define the major and minor vectors of the shape variation, which are then used as the axes of a coordinate system to form shape spaces in which similarities and differences between the surface shapes can be portrayed. The coordinate positions of the surfaces projected into these shape spaces can also be used for further statistical analysis.
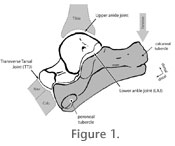 To illustrate use of the eigensurface technique, we perform an example analysis to infer locomotor morphology from the calcanea of four extinct mammalian carnivorans. The calcaneum is the largest bone in the mammalian ankle. With the distal tibia, it forms the primary ankle joint, and its long posterior tubercle acts as the lever arm for plantarflexion of the foot, powered by the gastrocnemius and soleus muscles that attach to its end via the Achilles tendon (Figure 1). The form of the calcaneum is closely related to locomotor function. However, because the functional aspects are subtle, 3D configurations of articular facets and bony processes are difficult to capture in a quantitative analysis. We applied eigensurface analysis to the calcanea of living carnivorans with diverse locomotor habits to extract quantitatively those aspects of the form that are associated with locomotor categories and use that information to categorize the extinct taxa. A detailed analysis of the locomotor morphology of the living taxa using an earlier version of eigensurface is presented elsewhere (Polly 2008). Here we concentrate on the fossil taxa and focus on a description of the morphometric method. To illustrate use of the eigensurface technique, we perform an example analysis to infer locomotor morphology from the calcanea of four extinct mammalian carnivorans. The calcaneum is the largest bone in the mammalian ankle. With the distal tibia, it forms the primary ankle joint, and its long posterior tubercle acts as the lever arm for plantarflexion of the foot, powered by the gastrocnemius and soleus muscles that attach to its end via the Achilles tendon (Figure 1). The form of the calcaneum is closely related to locomotor function. However, because the functional aspects are subtle, 3D configurations of articular facets and bony processes are difficult to capture in a quantitative analysis. We applied eigensurface analysis to the calcanea of living carnivorans with diverse locomotor habits to extract quantitatively those aspects of the form that are associated with locomotor categories and use that information to categorize the extinct taxa. A detailed analysis of the locomotor morphology of the living taxa using an earlier version of eigensurface is presented elsewhere (Polly 2008). Here we concentrate on the fossil taxa and focus on a description of the morphometric method.
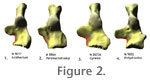 Our goal was to test the ability of eigensurface to assign calcanea to locomotor categories. We chose four fossil species whose locomotor specializations are understood based on other skeletal and palaeoenvironmental evidence (Figure 2). Three of the species are from the classic Miocene site of Pikermi, Greece (Black et al. 1980;
Solounias 1981). Paramachairodus orientalis
was a cat somewhat larger than the modern Leopard. Like other felids, P. orientalis had four hind toes and walked with a digitigrade stance (Pilgrim 1931). Paramachairodus had smaller, more flexible hindlimbs than the Leopard and was probably a better climber (Turner 1997). Enhydriodon latipes was a large otter. Like living otters, it had five hind toes and a flexible ankle used for both walking and swimming (Pilgrim 1931). Ictitherium viverrinum was a medium-sized carnivoran related to modern hyaenas and like them had four hind toes and a digitigrade, terrestrial stance (Pilgrim 1931;
Werdelin 1988). The fourth species is an amphicyonid from the Oligocene of Allier, France, Cynelos lemanensis. This "bear dog" species was a five toed plantigrade omnivore. Our goal was to test the ability of eigensurface to assign calcanea to locomotor categories. We chose four fossil species whose locomotor specializations are understood based on other skeletal and palaeoenvironmental evidence (Figure 2). Three of the species are from the classic Miocene site of Pikermi, Greece (Black et al. 1980;
Solounias 1981). Paramachairodus orientalis
was a cat somewhat larger than the modern Leopard. Like other felids, P. orientalis had four hind toes and walked with a digitigrade stance (Pilgrim 1931). Paramachairodus had smaller, more flexible hindlimbs than the Leopard and was probably a better climber (Turner 1997). Enhydriodon latipes was a large otter. Like living otters, it had five hind toes and a flexible ankle used for both walking and swimming (Pilgrim 1931). Ictitherium viverrinum was a medium-sized carnivoran related to modern hyaenas and like them had four hind toes and a digitigrade, terrestrial stance (Pilgrim 1931;
Werdelin 1988). The fourth species is an amphicyonid from the Oligocene of Allier, France, Cynelos lemanensis. This "bear dog" species was a five toed plantigrade omnivore.
|